广义拓扑,简单来说就是空间的定性性质。
导论
从初等定义谈起
我们的高等数学或者说是复变函数,在我们学习集合时,经常会引入以下的几个概念:
- 点的邻域:以为圆心,以为半径的一个开圆即为点的邻域,记为即满足不等式的那些点的集合。
- 内点:点,集合,,存在一个邻域使得则称为的内点。
- 边界点:点,但是对于的任意的一个领域 都有:,且.
据此,在高数中,我们定义了极限(语言),连续,导数,微分(解析的含义);在复变函数中定义了单,复连通域,进而定义了可微性与解析性。
连续如何定义?如果用语言就是:设 是一个函数,对于任意的正数总可以找到,使得当 时,换个角度来看这个定义,说的是存在一个的邻域;说的是对于任意的的邻域,其中,而任意的,存在一个要求的是
接下来很重要的一个概念:开集,即集合的点都是内点。举个例子:
Q:对于一个单点集,它是不是一个开集?
A:不是开集。因为点a不是集合的内点。
到此我们定义的所有东西似乎都起源于一个东西:我们定义了距离 的这一概念。也就是当我们在讨论函数的连续性,可微性等解析性质时,依赖于我们定义了一个描述两点间距离的函数[1]。
\begin{equation} d\left( x,y;x_{1},y_{1}\right) =\sqrt{\left( x-x_{1}\right) ^{2}+\left( y-y_{1}\right) ^{2}}\tag{1} \end{equation}才产生了各种曲线,即对应的就是我们在解析里使用的各种函数。
进一步,来看我们周围的三维欧几里得空间,我们定义一个开球:
借此来引入实分析里的子集的有界性,点列的收敛性,和其它点集的映射的连续性。那么这里就有一个问题是:实分析里面有多少的结果是依赖于距离的定义[2] 。
但是,在闵氏空间中的距离是这样定义的:
很明显,可以等于,可以为负,所以我们描述连续等一些性质时,距离是不必须的。
拓扑空间
Q:在我们的印象里,说到与我们都会自然的认为这两个所表达都是维空间,但是两者有什么区别呢?我们需要这一节来回答这个问题。
开集的引入
首先需要明确,我们为什么需要开集?实验的测量结果不可避免地要受到精度的影响,相应的一些出现在基本方程的自然常数(如薛定谔方程中的普朗克常数,相对论中的光速,麦克斯韦方程的电子电荷)都不能够被相对精确的测得[3]。换句话说,我们建立的物理方程的基础是在假定:如果一个物理学量是可接受的,那么必定会有一系列的误差范围内的值是可接受的。
基于此,我们需要思考,物理量属于一个集合,什么样的集合呢?在每一个可接受的值的邻域内都有另外的一个值可以被平等的被接受,以此类推。也就是说,集合被赋予了这样的一个性质:在集合里的点的周围都存在着一个相同类型的集合,我们称其为"开集" ,记住此时的开集在延续我们初等开集的概念。
何为拓扑?
我们再来看一下初等开集,简单的来说,开集可以看作一些内点的集合,那么开集可以表示为内点的邻域[4]的并集,一个集合可以有无穷多个内点,则可以看作无穷开集的并。那么我们抽象出拓扑的定义
对于给定的点集S,拓扑就是集合S的满足以下条件的子集族(也可被称为开集):
为什么要求有限个集合的交,仍然属于这个子集族,而不是无限数量的集合相交?如果我们要求无限个集合相交得到的可能就是一个单点集。比如考虑一个点的同心圆的邻域,并且同心圆不断地缩小,你最后得到的交集的结果是一个单点集合,此时不是这个单点集的内点,这是一个闭集。闭集当然不在同心圆开集的子集族中。因此集合上的拓扑是包含全集和空集的的子集的集合,这个集合中的元素有限的交和任意的并都在这个集合中。其中包含了全部子集的子集族称为离散拓扑,只包含了全集与空集的子集族称为平凡拓扑。可以看出,定义拓扑就是在定义集合中哪些是开集,定义拓扑就是在定义定义开集,那么自然的闭集就是定义的开集相对于全集的补集。这个开集的定义是针对点集而言的。
拓扑空间
我们先来看一看拓扑空间的定义:
拓扑空间就是定义了拓扑点集,一般记为
但是,从定义可以看出,这个拓扑空间与点集就只是差了一个定义的拓扑结构,也就是在集合上定义了开集。有一点很重要:同一个开集可以定义不同的拓扑,而同样的拓扑可以定义在不同的集合上。也即,拓扑空间上的开集不一定是拓扑空间定义的开集。所以有意义的是拓扑空间,单讲点集与拓扑都是没有意义的。也就是说我们在研究什么极限、连续、解析性质时,是在拓扑空间上而不是简单的在某个点集上。
例:【有限空间】
给定一个点集定义其上的的拓扑,可以证明满足拓扑的那三条公理化定义。同时我们也可以给出点集上的另外一个拓扑可以看出拓扑上的开集在拓扑的意义下是闭集!
我们之前说过有了拓扑就有了开集,有了开集就能研究分析范畴里的东西,那么我们可以看看如何在拓扑(推广化的开集)中定义邻域。给定一个点,任意的集合都包含一个属于T的拓扑,且集合包含,称集合为点的邻域。其中不一定要是拓扑中的开集,所以任意的点都至少包含一个邻域就是.
我们再来看看对于最开始的欧几里得空间。对于点集,其中的元素为
\begin{equation} \mathbf{p}=\left( p^{1},p^{2},p^{3},\dots,p^{n}\right) ,\mathbf{q}=\left( q^{1},q^{2},q^{3},\dots,q^{n}\right)\tag{4} \end{equation}通过定义距离引入开集的定义:满足下面定义的点构成开集
\begin{equation} d\left( \mathbf{p},\mathbf{q}\right) =\sqrt{\sum_{i=1}^{n}\left( p^{i}-q^{i}\right) ^{2}}\tag{5} \end{equation}也就是说,欧几里得空间是在上的拓扑空间,这个拓扑是将若干开球的并定义为开集,也就是说,你可以认为欧几里得空间是实数点集加上球拓扑,即
\begin{equation} \mathbb{E}^{n}=\left( \mathbb{R}^{n},\text{开球}\right)\tag{6} \end{equation}这就回答了我们开始提出的问题。
小结
Q:什么是拓扑?
A:在点集上定义的开集的子集族。
Q:什么是拓扑空间?
A:已经定义了拓扑的点集,称为拓扑空间,其具备点集和拓扑结构两大要素。
可数集与第一可数空间
什么是可数集[5] ?
如果存在一个双射使得X中的元素与中的元素一一对应,则称集合为可数集。
这个双射可以是也可以是因为双射是有反函数的。这里注意区分可数集与无穷集(来源于),可数集是无穷集,但无穷集不一定是可数集.我们再来看两个问题:
Q1:可数集的无穷子集是可数集吗?
A1:
Q2:由可数集组成的有限集或可数集,其并集是可数集。
A2:
所以我们可以看出:有理数集是可数集。
那什么是第一可数空间呢?
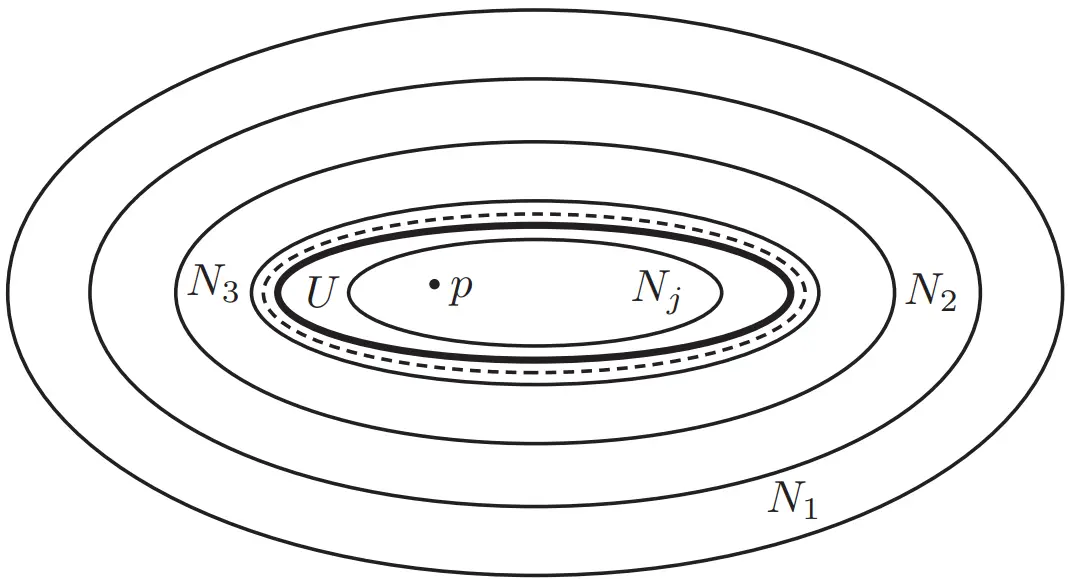
在空间中,任意的点都有一个开邻域的可数集,使得对于任意的包含的集合,都至少包含一个,称这样的空间为第一可数空间。
举个例子:在度量空间中,我们选取,我们知道有理数集是可数集,那么这样的一个开邻域可数集可以表达为,所以度量空间是第一可数空间。
拓扑基(拓扑空间的拓扑基)
我们已经知道什么是拓扑,当然如果我们想表示拓扑,完全可以将其中的开集全部罗列出来。但是这样做很显然是耗时且费力,而且对于拥有无穷开集的拓扑,这种表示显然是不可取的。类比,我们线性代数所学的线性空间的表示。对于线性空间中的矢量,我们并不是将其一一罗列,而是选了一组基底(极大线性无关组),来生成线性空间中的其它矢量。再回到我们的拓扑,我们需要找一找拓扑有没有这样对应的性质。看到拓扑的定义:给定任意数量(有限或无限)的子集族中的集合,他们的并[6]也属于这个子集族。也即开集的并是可以生成这个子集族中的元素的,那么我们就可以借此引入拓扑基的定义。
若集合 是拓扑空间 的基对于任意的开集 以及点 ,都存在一个,使得 成立。新的子集族
等价的来看,集合是拓扑空间的拓扑基的充要条件是:
- (即的每个成员都是开集)
- (即每个开集都是中一些成员的并集)
对于欧几里得空间的开球拓扑(原型拓扑基),它的拓扑基就是所有的开球,当然你也可以说开四面体,开的立方体…可以看到同一个拓扑可以有不同的拓扑基,而且大多数的时候拓扑基也是无穷的,只不过相对于拓扑里的一般开集而言更具有代表性。那么重要的是如何判断那些拓扑基生成的是同一个拓扑。
和定义了相同的拓扑对于每一个,以及每一个,都存在某个使得反之亦然。
对于实的欧几里得线,我们选取其上的所有形如的所有开区间,其中取遍所有的有理数,取遍所有的整数,我们知道有理数集,整数集都是可数集,我们称这样的拓扑基为可数基,当一个拓扑空间拥有至少一个可数基时,就称这个拓扑空间为第二可数
诱导拓扑
镶嵌在的通常的面的拓扑是通过维开球的交构成的,这个过程可以化为更为一般的情形:有一个拓扑空间,且是的子集。我们可以在上定义一个拓扑:将集合与中的开集相交作为上的开集。这被称为诱导拓扑,记为。
:
对于集合上定义的拓扑,其上定义的开集为,对于诱导拓扑上定义的开集为;
1.若,则;
2.若中的两个开集为,有,则,所以;
3.若中的任意数量的开集,有,则,可得.
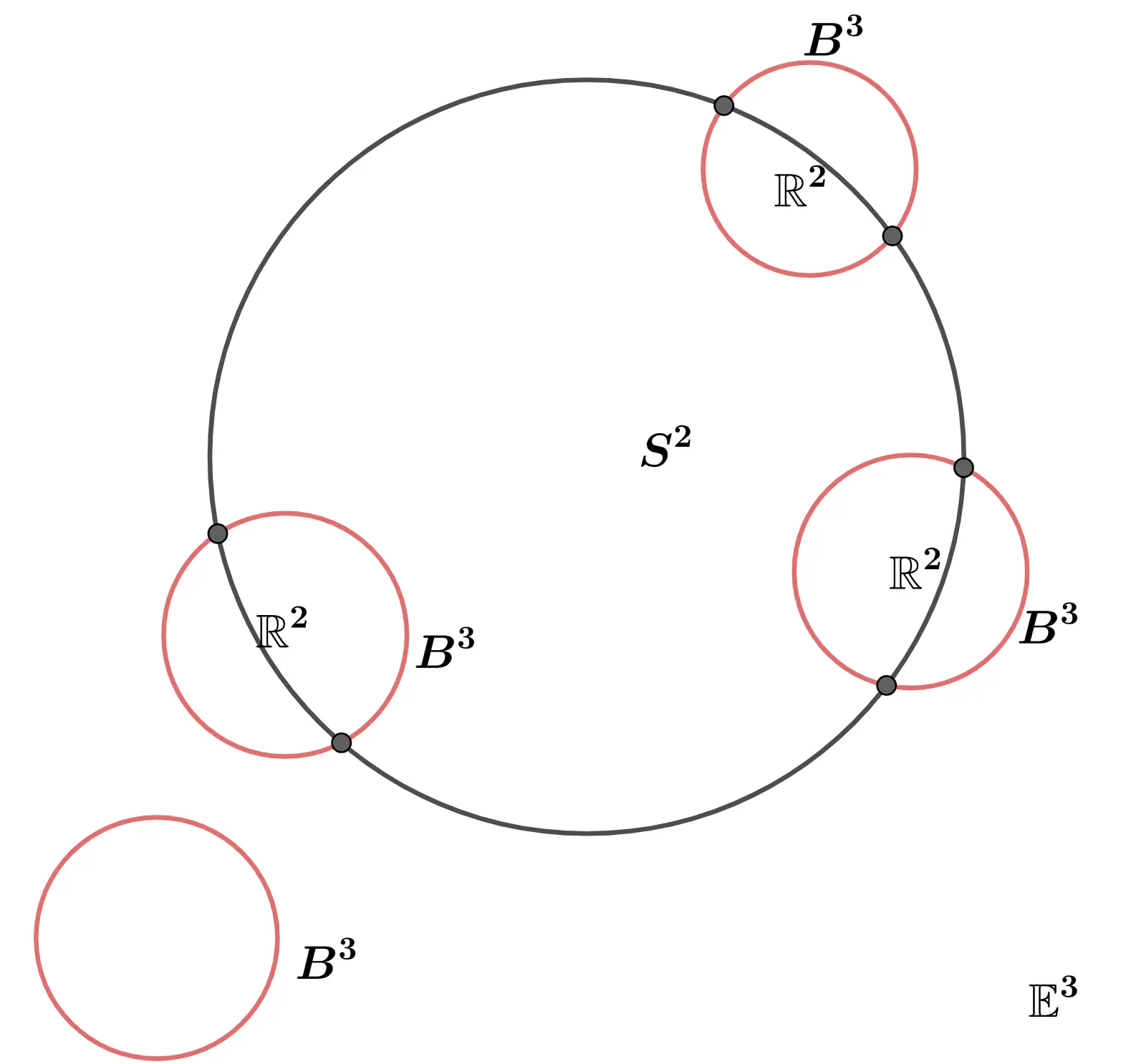
这就可以产生一个新的拓扑空间。一个维的球面是的点集,满足
由的开球拓扑诱导得到。如图所示,
我们有一个开球以及点集,其相交定义为开集。
实数集用开区间作为维的开球组成欧几里得拓扑空间。有理数集和它的补集无理数集的拓扑都是由维的欧几里得拓扑诱导得到。
下面举个例子
上半空间
上半空间的点集为
集合的定义中是包含超曲面的
的拓扑是被诱导出来的拓扑,也即,在定义带边界流形中发挥重要作用。两种类型的集构成拓扑基:
- 整个包含在里的开球;
- 对于切于的超曲面的每一个开球与切点的并集。
注意,对于2维的情况,包含与水平线的交点的集合对于不是开集,但是对于是开集。通常有人将上述的拓扑称为“swimmer’s topology” :假设流体的在底部以单位速度,从水平边界向上流入空间,且速度单调递减。一个游泳者以单位速度在流体的任意点以任意方向开始游泳。在单位时间间隔内,所有可能的游泳者的集合生成一个基。
粗糙拓扑与精细拓扑
我们考虑点集上的两个拓扑,如果的每一个成员都属于,那么我们称拓扑要比拓扑要更为粗糙,也就是说拓扑要比分的更细。比如说对于同一个点集有限拓扑[7]要比离散拓扑更加的粗糙。
一个问题:时空的拓扑
我们之前提到过,在闵氏时空中,无法从洛伦兹度规中得到拓扑,没有良好定义的开球。每当我们讨论函数的连续性时,我们总是假设拓扑规范的存在。因此拓扑规范发挥着重要的作用。我们接下来将通过拓扑来说明,但是这将会是错的,因为这样在类空与类时矢量间就没有区别了。首先一个事实就是。我们想要在空间部分和时间轴上保留欧氏空间的性质。
Zeeman提出了一个吸引人的拓扑结构:他是被定为上的拓扑,在空间部分诱导出一个拓扑、在时间轴上诱导出一个拓扑。它不是第一可数的,所以并不能够来自于任意的度规。
补集
给定一个集合的子集,它的补集为集合
在拓扑空间中,如果集合是一个开集,那么就是一个闭集。也即一个开集的补集是闭集,那么对于和在所有的拓扑空间中都是既开又闭的,也即两个互补的集合都被定义为了开集。
封闭性
封闭性是一个相对的概念:一个拓扑空间的拓扑子空间的子集在诱导拓扑中是闭的,即使在中可能是开的。举个例子,集合本身在诱导拓扑中可能是既闭又开的,但是集合是的一个开集。
集合是闭的还是开的取决于我们选取的拓扑,一个集合可能在一个拓扑中是开集,在另一个拓扑中是闭集。
连通空间
在闭区间上的连续函数往往具备很好的性质,比如——介值定理、最值定理、一致连续性定理。其实,这些定理的成立不仅依赖于函数的连续性,还依赖于函数定义域(也就是闭区间)的拓扑性质。
定义:连通空间是没有既开又闭的非空真子集的拓扑空间。在这种情况下,集合将不能被分解成两个不相交开集的并。
不要与路径连通性弄混淆。路径的连通性指的是:空间中的任意两点,我们都可以通过一条完全包含在空间里的曲线连续的连接。路径连通可以推出空间的连通性,但是空间的连通性推不出路径的连通性。比如说:一维的欧氏空间是连通的,只有它自己是既开又闭的;但是空间不是连通的,因为集合是一个既开又闭的真子集;上面的例子中的有限空间也是连通的。
离散拓扑
距离函数可以看作是将集合的一对数对,映射到实线(数)上,满足以下条件:称集合上定义了度量d的度量空间。 ↩︎
我们知道,当一个对象里含有一个最小的抽象结构,对于最小结构所引入的概念,那么拿掉这个较大的对象,这个概念也是成立的。反之,不成立。 ↩︎
有人可能会说,我们的不确定性原理不就是在约束我们无法测准?Attention!!!不确定性原理并不是说什么力学量都无法测准。你在一个力学量的本征态上去测,是可以测量得到其本征值的。什么是物理常数. ↩︎
内点的邻域可以看作开集的子集,且邻域也是开集 ↩︎
数学分析(卷1)卓里奇,P60. ↩︎
既然要生成集合中的元素,相交会使集合越来越小. ↩︎
有限拓扑是指一个拓扑空间中的开集个数是有限的。 ↩︎